Mạch cầu H là một mạch đơn giản cho phép bạn điều khiển động cơ DC đi lùi hoặc tiến. Bạn thường sử dụng nó với bộ vi điều khiển, chẳng hạn như Arduino, để điều khiển động cơ. Khi bạn có thể điều khiển hai động cơ tiến hoặc lùi – bạn có thể chế tạo cho mình một robot có những chức năng hoạt động đơn giản.
Khái niệm mạch cầu H (H-Bridge)
Mạch cầu H là một mạch đơn giản cho phép bạn điều khiển động cơ DC quay ngược hoặc quay về phía trước, tùy thuộc vào cách bạn kết nối điểm cộng và điểm trừ.
Nếu bạn đóng công tắc 1 và 4, bạn đã kết nối cực dương với phía bên trái của động cơ và cực âm với phía bên kia. Và động cơ sẽ bắt đầu quay theo một hướng.
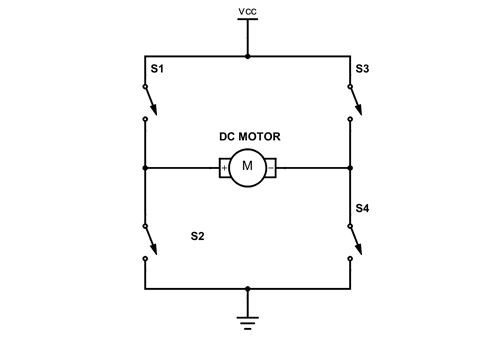
Thay vào đó, nếu bạn đóng công tắc 2 và 3, bạn đã kết nối cực dương với bên phải và cực âm ở bên trái. Và động cơ quay theo hướng ngược lại.
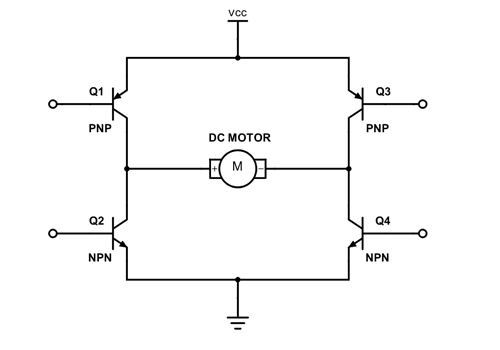
Bạn có thể xây dựng một mạch cầu H với bốn bóng bán dẫn. Vì bóng bán dẫn có thể được tạo ra như một công tắc, bạn sẽ có thể làm cho động cơ quay theo một trong hai hướng bằng cách bật và tắt bốn bóng bán dẫn trong mạch trên.
Thông thường, bạn điều khiển các bóng bán dẫn từ vi điều khiển, chẳng hạn như Arduino. Điều quan trọng nhất là tất cả các bóng bán dẫn có thể xử lý đủ dòng điện cho động cơ. Nếu không nó sẽ cháy hết.
Ví dụ, nếu động cơ sử dụng dòng điện 1 Ampe, bạn cần bóng bán dẫn có thể xử lý tối thiểu 1 Ampe.
Bóng bán dẫn PNP (hoặc Pmos) ở phía trên
Tiếp theo, bạn thấy tôi đã chọn bóng bán dẫn PNP ở phía trên và bóng bán dẫn NPN ở dưới cùng. Điều này sẽ làm bật hoặc tắt bóng bán dẫn là sự chênh lệch điện áp giữa đế và cực phát.
Với bóng bán dẫn PNP ở phía trên, bạn có thể sử dụng điện áp cao hơn cho VCC so với điện áp bạn sử dụng cho đế của bóng bán dẫn.
Ví dụ, bạn có thể sử dụng đầu ra 3,3V từ vi điều khiển và 9V cho Vcc.
Điều đó sẽ không hoạt động nếu bạn đặt bóng bán dẫn NPN ở trên vì bộ phát sẽ thấp hơn 0,7V so với đế. Bởi vì điều đó biến thành 3,3V – 0,7V = 2,6V ở cực dương của động cơ, bất kể bạn chọn điện áp VCC nào.
Giảm điện áp thấp giữa bộ thu và bộ phát
Các bóng bán dẫn TIP12x đưa ra mức giảm 2V từ bộ phát đến bộ thu.Trong cấu hình như vậy, bạn sẽ bị mất 4V trên các bóng bán dẫn. Tôi đã cố gắng kết nối cái này với Arduino, sử dụng nguồn cung cấp 5V của nó, nhưng không thành công vì nó chỉ còn 1V cho động cơ!
Về cơ bản, nó nói rằng các bóng bán dẫn TIP là đồ cổ mà chính xác là bạn không nên sử dụng nữa vì sự sụt giảm điện áp rất lớn này.Chọn các bóng bán dẫn có điện áp rơi thấp. Ví dụ bóng bán dẫn BD135 / BD136 hoặc MOSFET.
Điốt bảo vệ và chế độ PWM
Một tác dụng phụ của cách động cơ hoạt động là động cơ cũng sẽ tạo ra năng lượng điện. Khi bạn vô hiệu hóa các bóng bán dẫn để ngừng chạy động cơ, năng lượng này cần được giải phóng theo một cách nào đó.
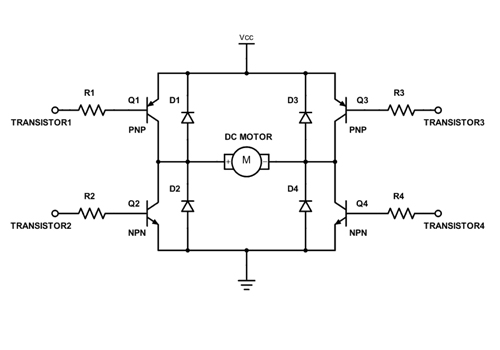
Nếu bạn thêm điốt theo hướng ngược lại cho các bóng bán dẫn, bạn sẽ tạo ra một đường cho dòng điện đi để giải phóng năng lượng này. Nếu không có chúng, bạn có nguy cơ điện áp tăng lên và làm hỏng các bóng bán dẫn của bạn.
Các điện trở đi vào mỗi cơ sở là ở đó để giảm dòng điện đến mỗi bóng bán dẫn. Không chắc chắn làm thế nào để tính toán nó? Nếu bạn đang sử dụng bộ vi điều khiển để điều khiển chúng, hãy bắt đầu với 1k và điều chỉnh nếu nó không hoạt động.














{kind=link}